Blog 7 - Software Development Milestone
Today, we made significant progress in our software development. We set up an environment that enabled us to do development for our bike system that was not directly on the Raspberry Pi. Going forward this enables us so that our software development iterations can be done quickly while enabling electrical and mechanical prototyping to be done simultaneously without having to be hampered by the use of the Pi for software development.
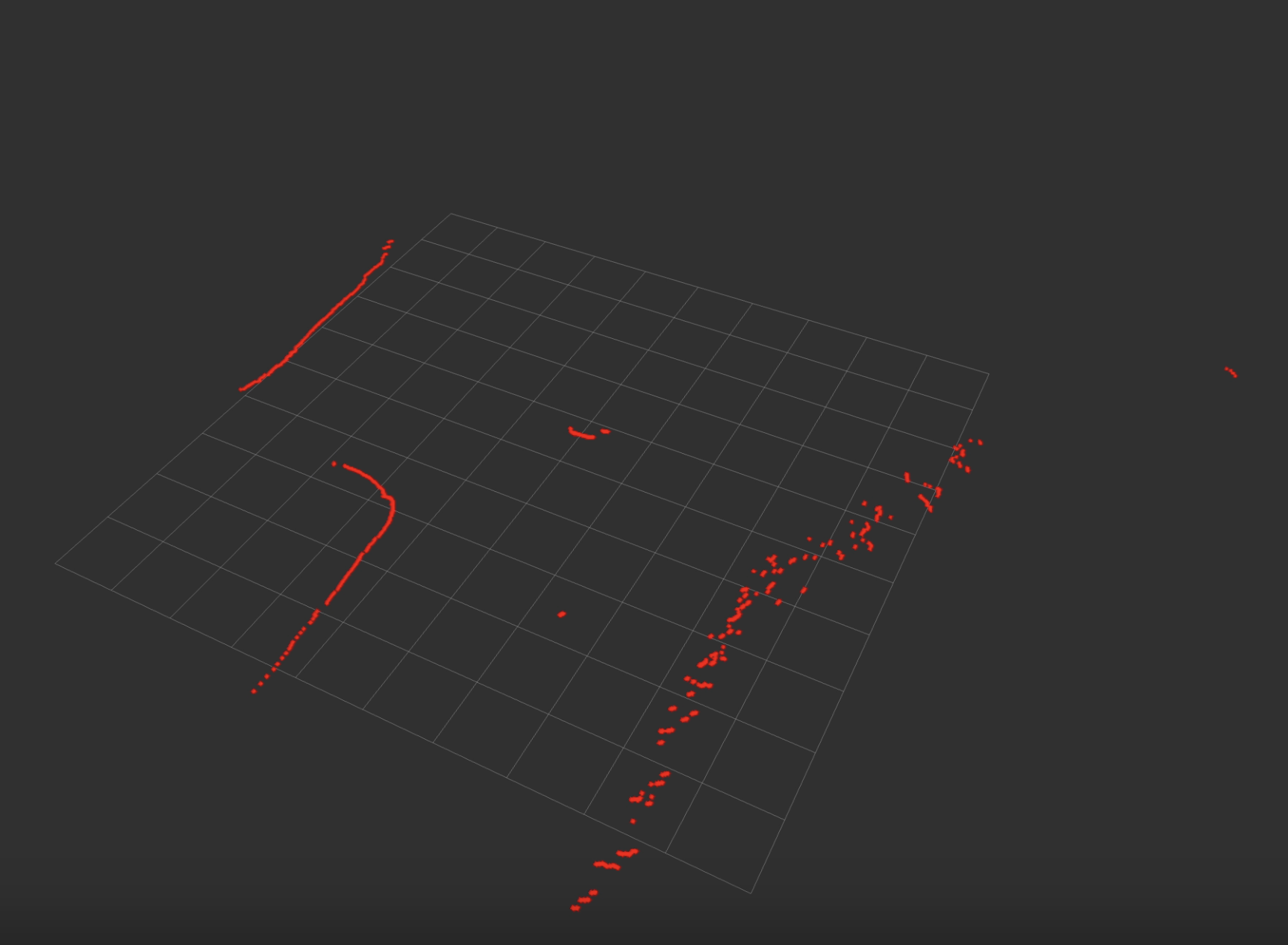
Beyond that, we were able to use the ROS bag test data we recorded and made progress toward our detection algorithm by converting the raw laser scan data to a geometrically transformed point cloud. A visualization of some of the test data we gathered after applying our geometric transformation code can be seen below.